Sometimes (often!) a LEGO creation is inspired by something in "real life". For a long time I've been impressed by high-mobility vehicles, for instance iRobot's PackBot design.  PackBot is currently used by the armed forces for finding IEDs, or scouting in urban environments, and is a wonder of engineering and design. While I've tried to implement this in LEGO before, I never really succeeded. Either the robot didn't have torque from the motors, or it literally tore itself apart from the forces on the frame.
PackBot is currently used by the armed forces for finding IEDs, or scouting in urban environments, and is a wonder of engineering and design. While I've tried to implement this in LEGO before, I never really succeeded. Either the robot didn't have torque from the motors, or it literally tore itself apart from the forces on the frame.
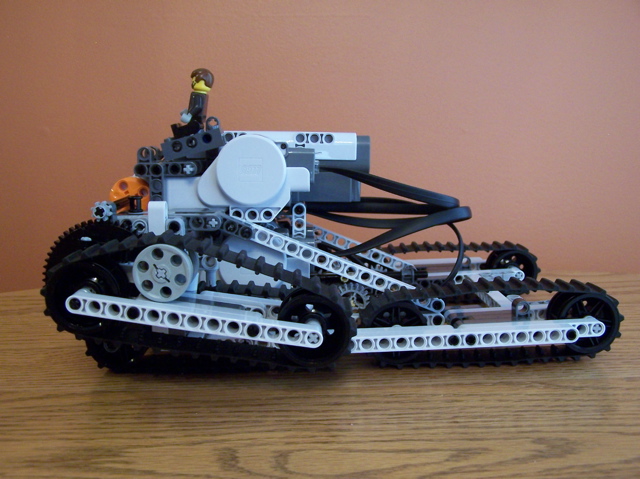
With the NXT I had a much better start: higher-torque motors with more control, as well as a studless system that encouraged connections that would not come apart easily. After a couple days, I came up with Unit LNE (LEGO NXT Explorer) of the Dinochrome Brigade (10 pts if you catch the reference ;-). Based on the PackBot design, it can climb a steep slope (30° or more), scale mountains of dirty laundry (or RCXs, or minifigs), and climb up steps taller than the robot itself. It can also flip itself back upright if it finds itself upside down (an accelerometer from HiTechnic is very handy in this regard). The first hurdle was getting one motor to drive both the belly treads and the flipper arm tread on one side, while still allowing the "shoulder" to freely rotate 360°+. The harder part was actually making the structure strong enough to take the resulting loads and torques without twisting apart.
on one side, while still allowing the "shoulder" to freely rotate 360°+. The harder part was actually making the structure strong enough to take the resulting loads and torques without twisting apart.
Sometimes looking at the world around you can give you some very challenging ideas for a robot. LEGO is "just a toy", but as an engineering tool it can be used to model some very impressive creations... but of course, I probably don't need to tell readers of this blog that :-).
More images can be found in my Brickshelf folder as well.
--
Brian "Bolo" Davis
 PackBot is currently used by the armed forces for finding IEDs, or scouting in urban environments, and is a wonder of engineering and design. While I've tried to implement this in LEGO before, I never really succeeded. Either the robot didn't have torque from the motors, or it literally tore itself apart from the forces on the frame.
PackBot is currently used by the armed forces for finding IEDs, or scouting in urban environments, and is a wonder of engineering and design. While I've tried to implement this in LEGO before, I never really succeeded. Either the robot didn't have torque from the motors, or it literally tore itself apart from the forces on the frame.With the NXT I had a much better start: higher-torque motors with more control, as well as a studless system that encouraged connections that would not come apart easily. After a couple days, I came up with Unit LNE (LEGO NXT Explorer) of the Dinochrome Brigade (10 pts if you catch the reference ;-). Based on the PackBot design, it can climb a steep slope (30° or more), scale mountains of dirty laundry (or RCXs, or minifigs), and climb up steps taller than the robot itself. It can also flip itself back upright if it finds itself upside down (an accelerometer from HiTechnic is very handy in this regard). The first hurdle was getting one motor to drive both the belly treads and the flipper arm tread
 on one side, while still allowing the "shoulder" to freely rotate 360°+. The harder part was actually making the structure strong enough to take the resulting loads and torques without twisting apart.
on one side, while still allowing the "shoulder" to freely rotate 360°+. The harder part was actually making the structure strong enough to take the resulting loads and torques without twisting apart.Sometimes looking at the world around you can give you some very challenging ideas for a robot. LEGO is "just a toy", but as an engineering tool it can be used to model some very impressive creations... but of course, I probably don't need to tell readers of this blog that :-).
More images can be found in my Brickshelf folder as well.
--
Brian "Bolo" Davis