For an (internal) contest some time ago, some MINDSTORMS veterans took up the challenge to build NXT tripods, i.e., NXT-based robots on three legs that would be able to autonomously walk in arbitrary direction (without rolling) and avoid or cross obstacles.
Though it doesn't look so at a first glance, this is a rather difficult task from the engineerical point of view which might be the reason why so few actual working tribot robots have been built so far.
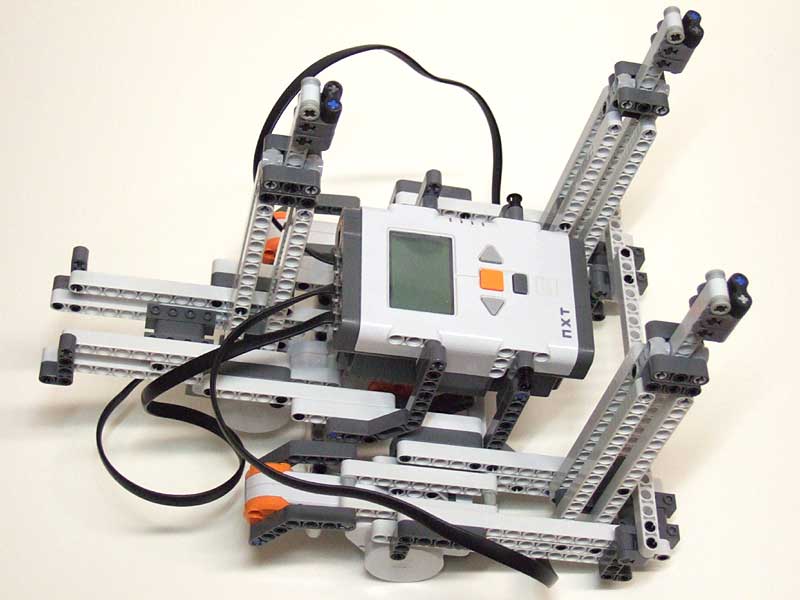
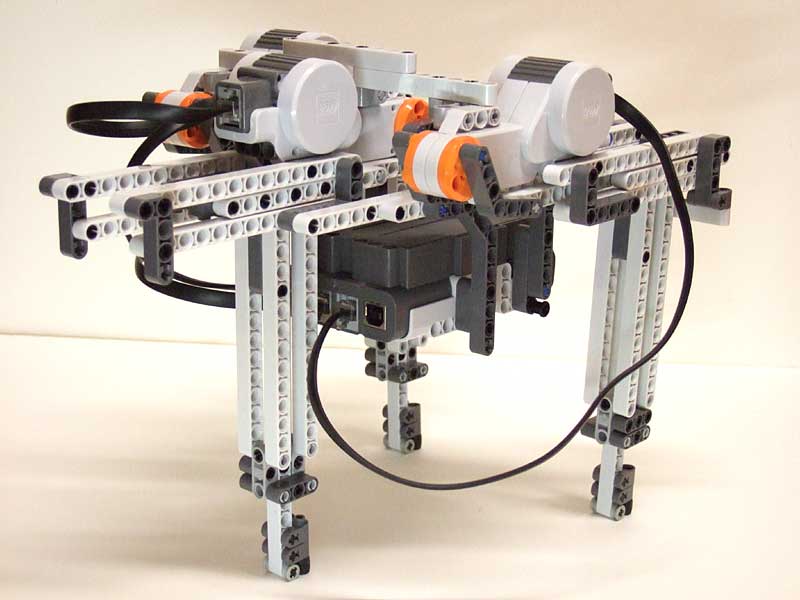
One of the prototypes that arose from that efforts is that of Philo:
It walks along with a "dragging" movement. More movies can be seen here, pictures are available here, here, here and here.
{kind=link}
{kind=link}
{kind=link}
{kind=link}