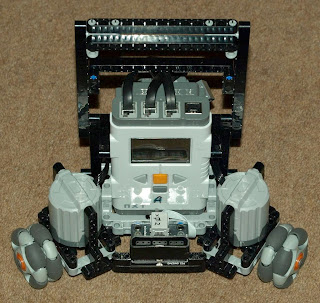
RJ McNamara has posted a very nice description of a holonomic drive system. It uses Power Functions motors instead of the regular NXT ones and Rotocaster wheels. These wheels along with the 120 degree separation of the drive wheels allows holonomic robots to move forward, backwards as well as side to side. (They can also spin on their own axis as they travel in a straight line which is cool to watch.
What's great about this post is that he goes through the Math necessary to control the robot. He does a really good job of laying out the equations and how they need to be used to get the robot to move the way you intend.
Full details - http://www.rjmcnamara.com/2012/06/holonomic-platforms-robotc/
What's great about this post is that he goes through the Math necessary to control the robot. He does a really good job of laying out the equations and how they need to be used to get the robot to move the way you intend.
Full details - http://www.rjmcnamara.com/2012/06/holonomic-platforms-robotc/