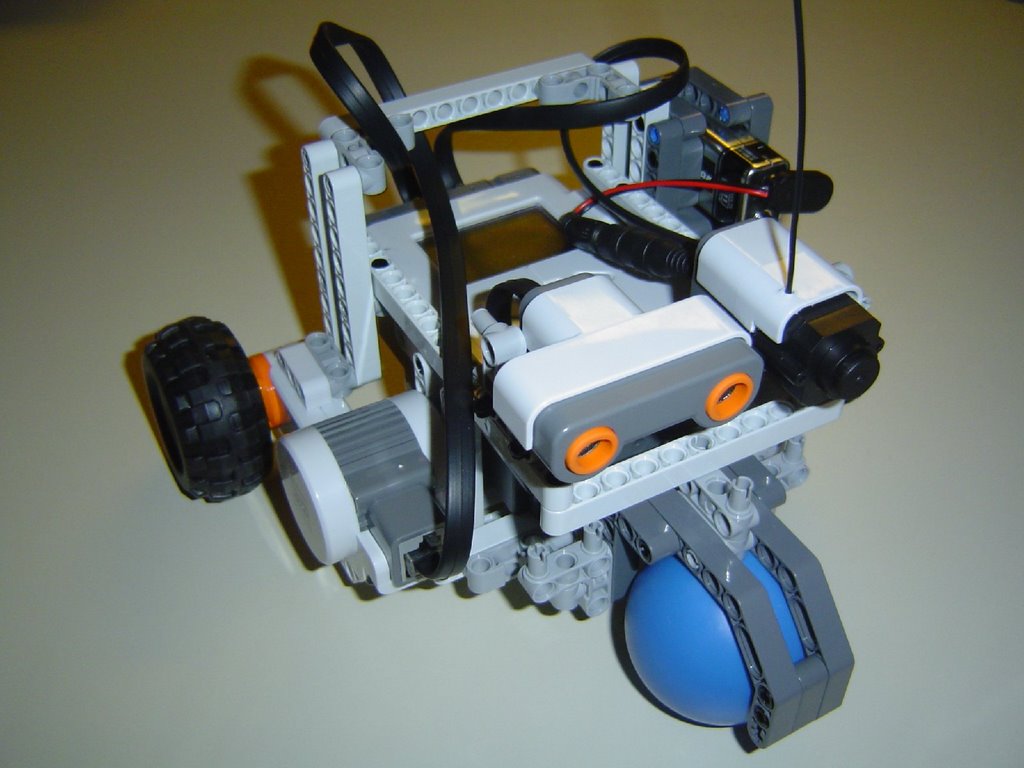
 I wanted a bot that was low to the ground for a robot's perspective. This robot can be remote controlled using a 2nd NXT or using a program like OnBrick.
I wanted a bot that was low to the ground for a robot's perspective. This robot can be remote controlled using a 2nd NXT or using a program like OnBrick.Now that I've got the bugs worked out, I'm going to use the RoboRealm software to control the NXT (via Bluetooth) based on input from the wireless camera and the Ultrasonic sensor. Also in the robot is one of the smallest cables - it's from HiTechnic and is approximately 4.75 inches (12cm) and I've used it to connect the Ultrasonic sensor to the brick. I didn't want to have to wrap another cable around, so this was a nice solution.
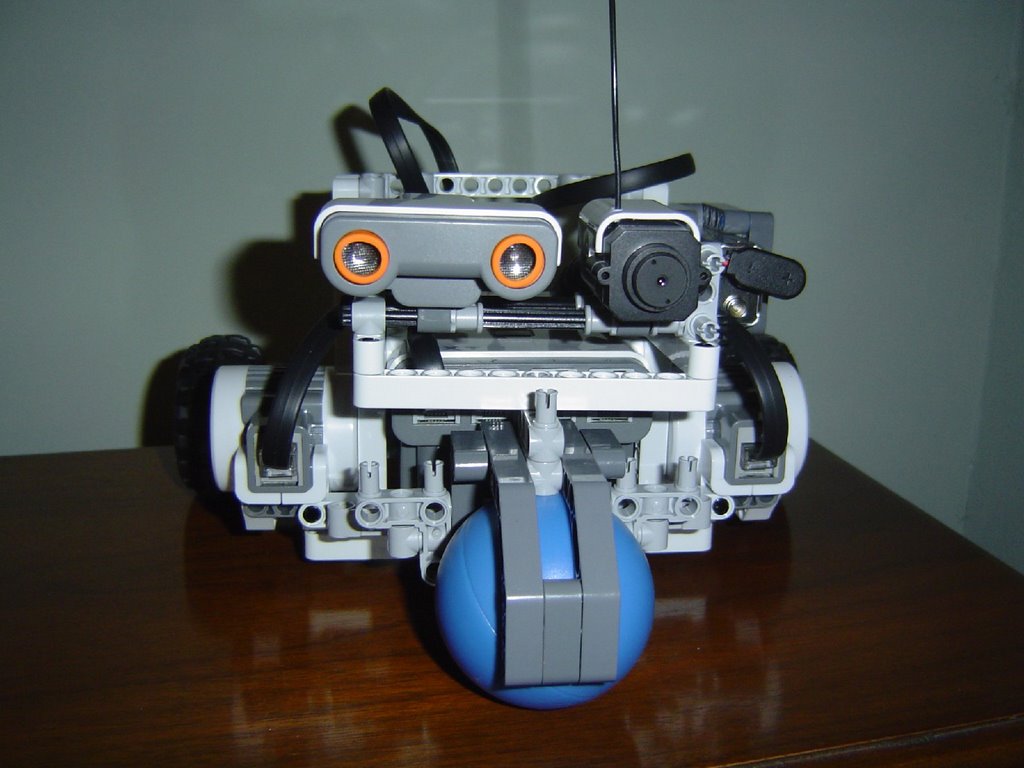
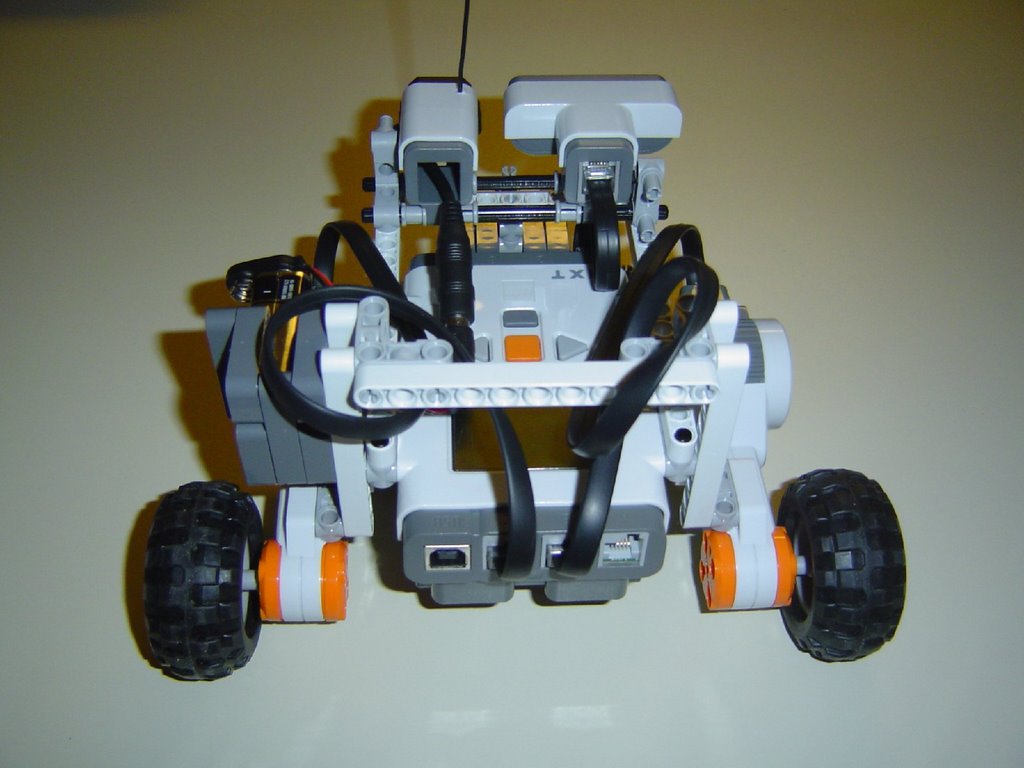 I call it Sneeker, but it is not very sneaky... the motors would give away its location if anyone was paying attention. The wireless camera is also static-mounted, parallel to the floor and does not move. I may try and add some functionality that allows the camera to swivel, but that would require adding a 3rd motor and I wanted to avoid another motor and keep the bot small and compact.
I call it Sneeker, but it is not very sneaky... the motors would give away its location if anyone was paying attention. The wireless camera is also static-mounted, parallel to the floor and does not move. I may try and add some functionality that allows the camera to swivel, but that would require adding a 3rd motor and I wanted to avoid another motor and keep the bot small and compact.To view the feedback, I purchased a USB device that allows me to connect the wireless camera receiver to my laptop. Now I can control and watch my bot... or just let it roam on its own.
 It's getting dark now, and the wireless camera doesn't do that well in low light, so I'll record some of its roaming around tomorrow and post a video.
It's getting dark now, and the wireless camera doesn't do that well in low light, so I'll record some of its roaming around tomorrow and post a video.